こないだのツーリングで60km/hからコーナーの旋回性が異なると話をしたと思うけど、なぜだろう?ってずっと考えていた。自分の好みは低速でも切れ込むオーバーステア※1なセッティングにしておいてアクセル当ててニュートラルなステア特性にするのが好みなのに、最初からニュートラルなステア特性だから、速度を上げるとアンダーステアな感覚となっていたのかなぁ?なんて解析していた。でも待てよ。そういえば速度に対して異なるハンドリングと言えば・・・。CBR600RR’07-08の売り文句に電子制御ステアリングダンパー「HESD:Honda Electronic Steering Damper」ってのが付いていたではないですか・・・。
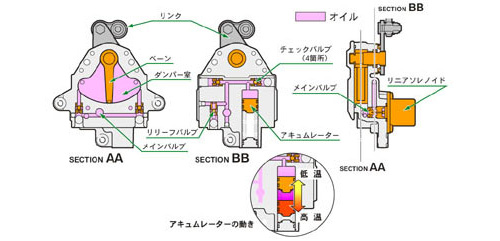
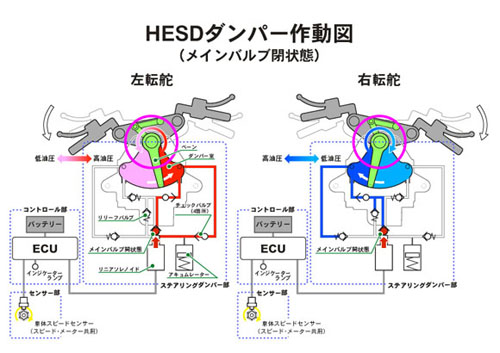
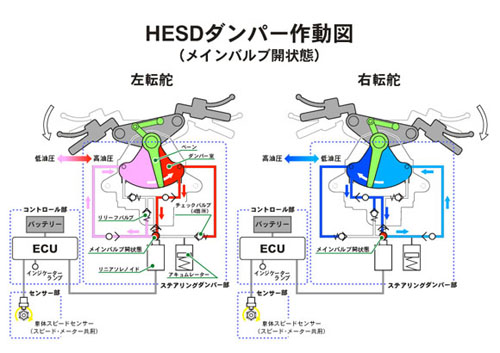
そうこのHESD は車速と加速度に応じて、電子制御によりダンパーの減衰特性を最適に制御する。車速と加速度をセンサーが感知してECUで制御することで、低速時にはハンドリングの軽快感を損なわない取りまわしを可能にし、高速時では路面からの外乱や振動を抑えて安心感のあるハンドリングを実現という売り文句である。
むむむ。
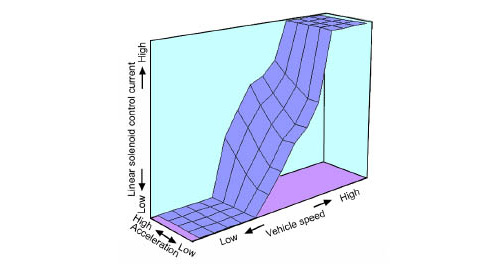
調べて見る必要がありそうだ。特性マップは何処に?調べてみる必要がありそうだ。Webより探してみると下記に概略の特性マップの記載がありました。
HONDA MotorCycleTechnology
http://www.honda.co.jp/tech/motor/close-up/hesd/index.html
なるほど・・・。
見る限りある速度域から急激に制御レベルが立ち上がっているではないですか?私の仮説が正しければ、これが私が感じたステアリング特性の違和感であったと推定される。無論、高速道路でのレーンチェンジなんかは安定して差動するのだろうと思うのだけれど、狭いワインディングのような斜線いっぱいを使用してアクセルのオンオフで旋回のタイミングを作るときには、もしかしてステア角度の変化を抑えてしまう、つまりアンダーステアリングとなってしまうのではないだろうか?
ツーリングをメインにしているライダーやサーキットユースのライダーは感じなくとも、コテコテのジムカーナライダーや開け開けのダートトラックライダーだからこそ感じてしまうのかもしれない。本来はこのCBR600RR’07-08はステアリングの角度に頼らず、寝かし込みや緩やかなライン取りをすることで曲げることが前提なのかもしれません。オーバーステアなセッティングにしておいてアクセル当ててニュートラルなステア特性にするという走りの組み立てには向かないのかもしれないです。
で調査する方法ですが、二つあります。まずは外して走って感覚で確かめる。調べるとHESDは電流制御しているので、テスターを噛まして走行して見てその特性をデータとして探る。もしマッピングが作りたかったらHESDのエンコード出力と電流変化をロギング※2すれば良いわけです。ということで、まずは外してみるのが早そうですね。
ジムカーナの速度領域でどうなるのか?それも、知りたいですね。でも、まだタイヤが端まで使えてない自分は、その領域を試すことができません(笑)10年前の自分カンバーックって叫んで見たり・・・。
そうそう、もしこの仮説が正しいと、デメリットがありますね。こんな二段階のステア特性があったらセッティングができないじゃん!もし峠で走りやすい中高速を基準にセッティングをすると、低速でダメダメとかになっちゃうかも・・・。やっぱりいらないのかHESD・・・。週末は晴れらしい。さて私の仮説が正しいかどうか?試して見るので好ご期待です。
※1.オーバーステアとは
ステアリングの実舵角を一定にして定常円旋回を行ったときに、 旋回半径が車速の増大に応じて小さくなる特性のこと。今回の話ではオーバーステアにセッティングすれば、スピードがあがれば小さく曲がれるはずなのに、HESDがその特性をスポイル(台無し)にしてしまっているのではないかということ。また逆に車速が高くなるほど旋回半径が大きくなる特性をアンダーステアと言い、速度に対して一定な感じで変わらないハンドリングをニュートラルステアといいます。
※2 ロギングとは
制御信号を記録しておいて、後で読み出してその変化がいつ?どの程度発生したかを調べること。私の職業は電子機器の研究職なので解析は本職。手軽にできそうです。